Temporal diagram
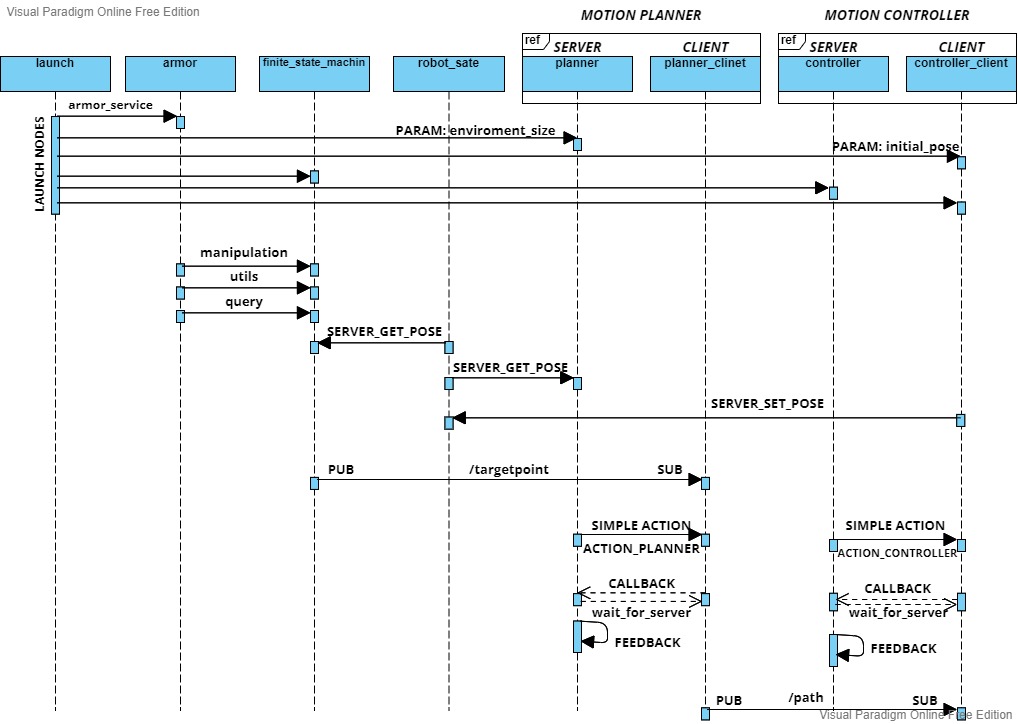
At the beginning Launch file topological_map_robot_control.launch,
starts six nodes and one armor service. The service works directly
with the FSM node and the topological_map.owl map. The service
allows the FSM node to modify, check, and load the topological_map.owl map.
In addition Launch file sets the size of the environment at the planner
node and the initial position of the robot in the environment at the controller_client
node. Parameters were used to set the values.
FSM node publish \target_point to planner_client. Planner make a path to use
different point to reach goal and publish \path to controller_client node.
Nodes in pairs like MOTION PLANNER and MOTION CONTROLLER start working with
each other through SimpleAction. The first node has role of server and the second
node has role of client, client uses CALLBACK to connect to server and server uses
FEEDBACK to control status of client.