Map
Environment
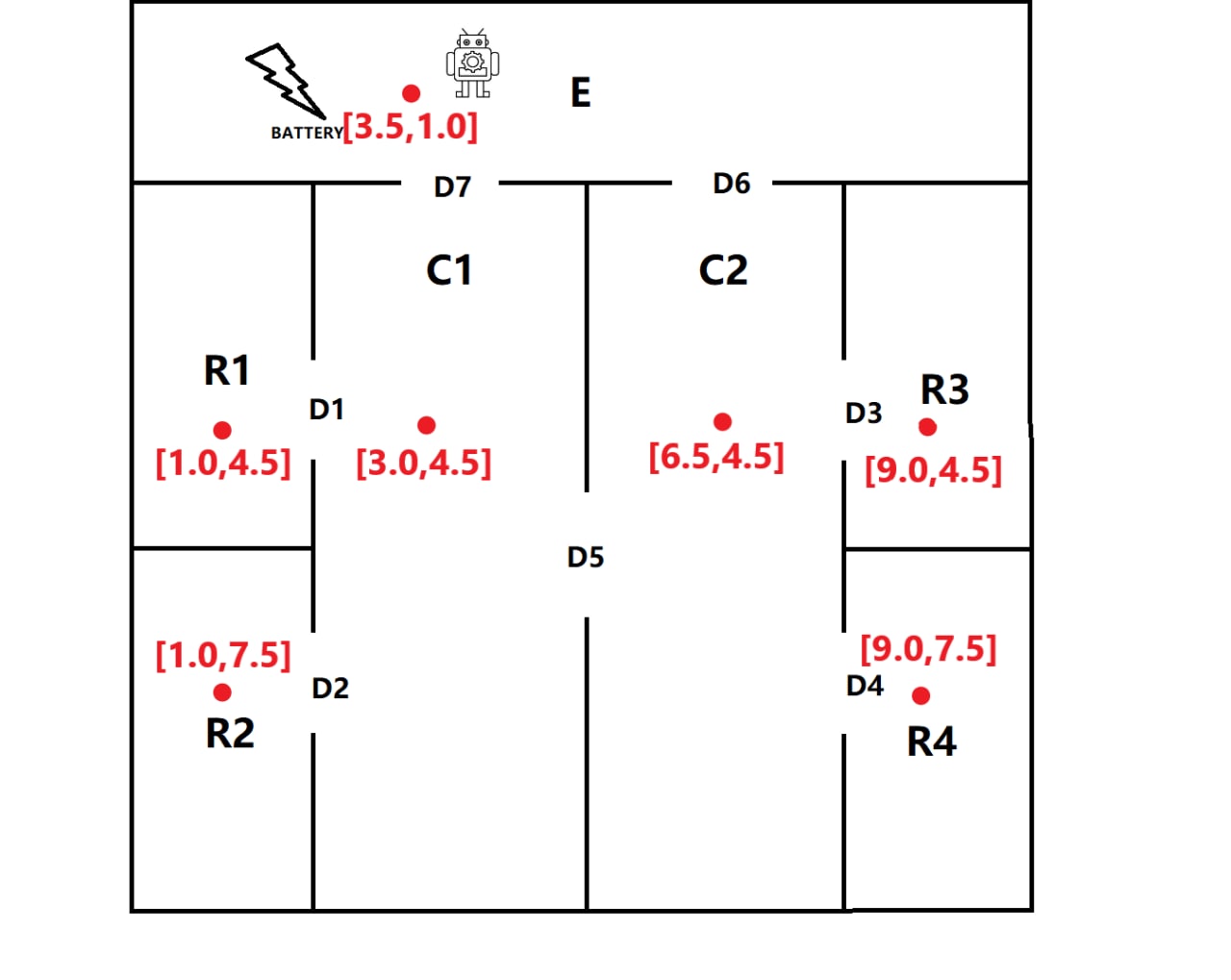
The general mapping was built in this form. I considered an environment 10x10 and for each room I considered a point so the planner starts making a connection between points to go from one room to the other. The initial position of the robot is considered in room E and every time the battery robot is low it must return to this room and recharge itself.
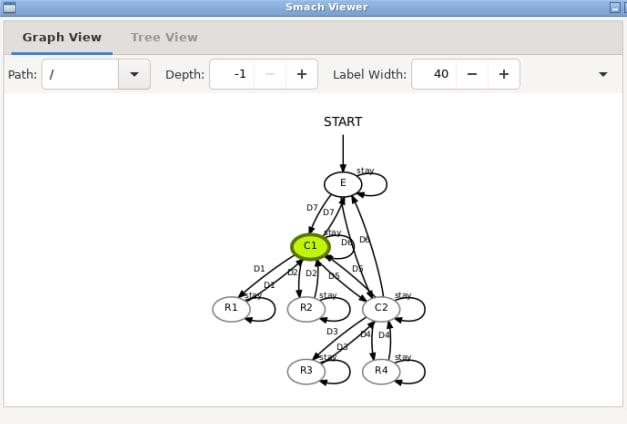
SMACH viewer
After launching smach viewer, you can see robot status changing between rooms and wait for a few seconds in each room.